Un pyranomètre ou « sonde d’irradiance » est un capteur de flux thermique utilisé pour la mesure de la quantité d’énergie solaire en lumière naturelle et est notamment utilisé en météorologie.
Le capteur que j’ai réalisé n’a pas la prétention d’un véritable capteur de mesure mais il a l’avantage d’être rudimentaire et de donner une bonne indication sur le rayonnement solaire.
Construction
Ce petit dispositif de mesure du rayonnement solaire a 2 fonctions :
- il complète ma station météo avec une indication sur l’ensoleillement journalier
- il permet de prendre en compte l’ensoleillement dans la gestion de mon chauffage en anticipant l’arrêt du planché chauffant et s’affranchir de son inertie.

Le pyranomètre se présente sous la forme d’une sphère transparente renfermant un capteur de température DS18B20. La sphère en verre est une boule de décoration de Noël. Le fait qu’elle soit en verre permet de pérenniser son excellent luminosité. On trouve très facilement des boules de Noël en plastique mais elles ne sont pas de la même qualité.
Le capteur est peint en noir mat pour mieux absorber le rayonnement infrarouge. Les fils de connexion passent dans un tube en caoutchouc (récupération d’un tuyau de gaz) qui assure la fixation mécanique de la sphère et un tube électrique qui assure la rigidité. L’assemblage n’est pas étanche mais permet l’écoulement des éventuels condensats.
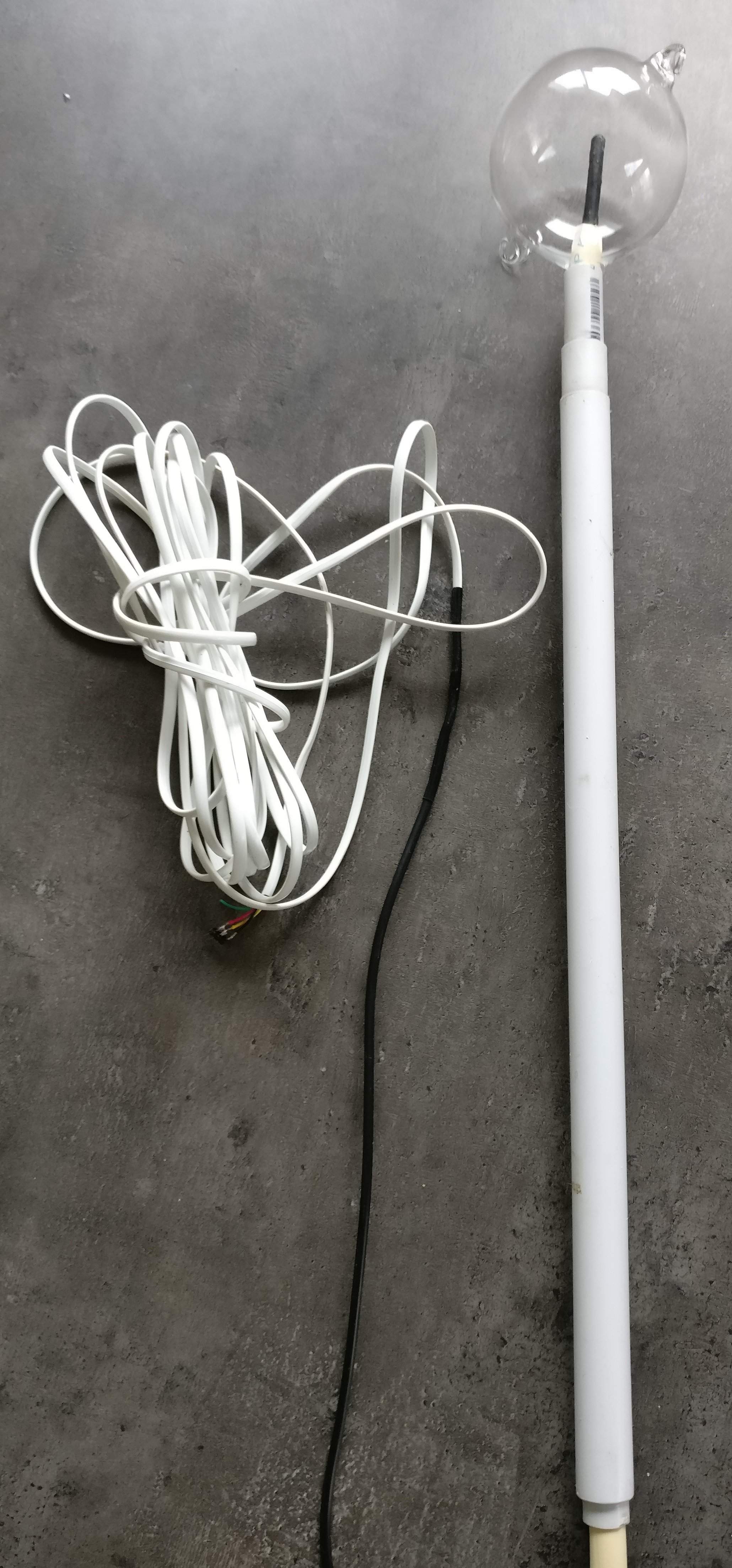
pyranomètre complet sur son tube support
Afin d’assurer une bonne rigidité face au vent, le support est constitué de 2 tubes électriques concentriques. Le pyranomètre est installé sur le toit de mon abri de jardin afin de bénéficier d’un ensoleillement optimum.
Principe de mesure
La conception matérielle de ce capteur est inspirée de celle de Michel.mo http://michel.mo.pagesperso-orange.fr/ensoleillement/1_generalites.htm avec un dispositif un peu plus élaboré et des précisions sur le principe de la mesure. Pour la partie logicielle, je n’ai pas de logiciel spécifique, les calculs sont réalisés par ma boxe domotique.
Le principe de mesure d’ensoleillement est basée sur 2 températures :
- la température mesurée sous abri issue de ma station météo
- la température mesurée par le pyranomètre
La différence entre les 2 mesures est le reflet de la puissance du rayonnement solaire. La corrélation avec l’altitude du soleil variable en cours de journée et dépendant de la saison permet de gérer l’intensité de l’ensoleillement.
Mesures obtenues
Ce dispositif très sensible et très réactif aux changements d’ensoleillement n’as pas une réponse linéaire. Il présente une courbe aplatie et la corrélation n’est pas parfaite avec l’altitude du soleil donc la puissance du rayonnent. La température de la sphère se stabilise avec un maximum de 25°C plus élevée que la température sous abri.

Image ci-dessus par temps froid et ensoleillé au mois de mars : température extérieure sous abri 6°C et température différentielle stabilisée autour de 20 à 22°C.
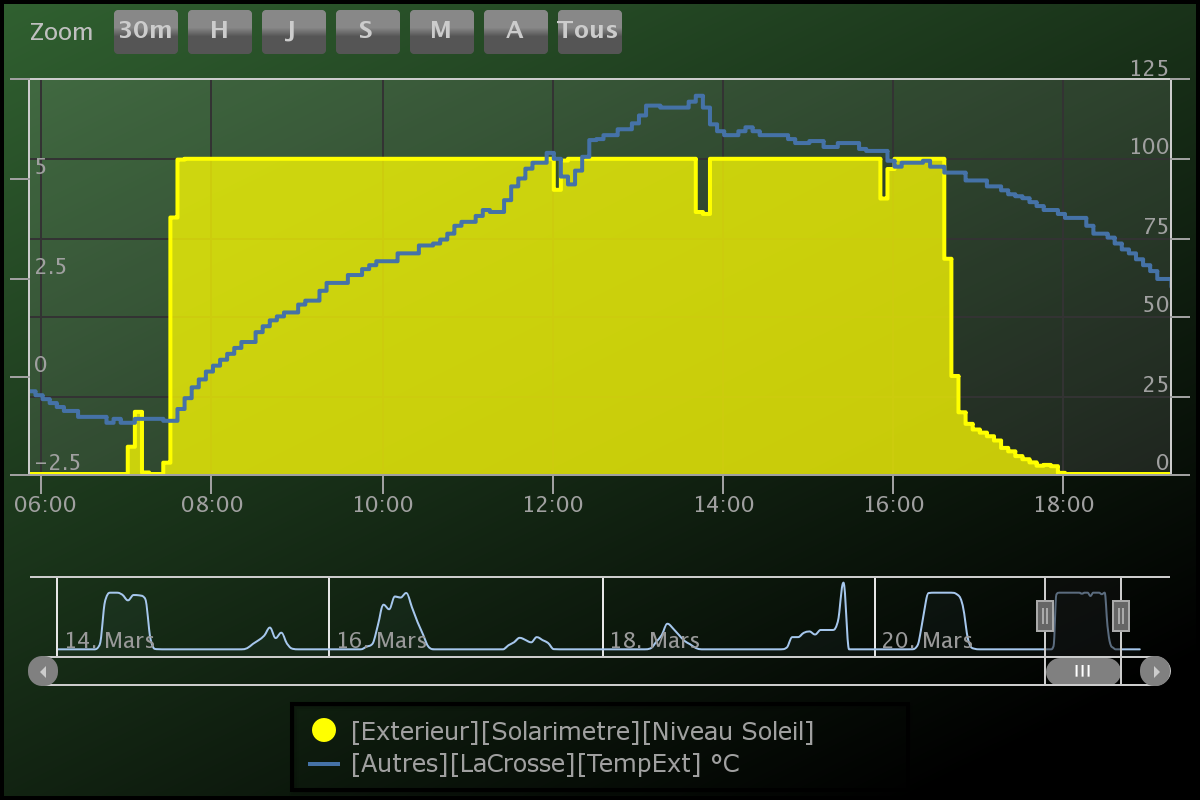
L’algorithme déterminé mis au point par ajustement permet de déterminer le niveau d’ensoleillement. On voit que les petits passages nuageux vers 12, 15h30 et 16h sont bien détectés.









 - noir")