1 Conception mécanique de la balance (version 100kg)
Contraintes du projet
Je débute l’apiculture depuis mais 2016 avec des ruches Warré. Ces ruches sont peu courantes contrairement aux ruches Dadant très utilisées par les professionnels et d’amateurs.
Des différences essentielles caractérisent les deux modèles :
- ruche Dadant : ruche basse et large avec un grand corps principal est un ou plusieurs éléments secondaires qui viennent se superposer pour recevoir le miel. Les rayons de cire sont dans des cadres préfabriqués.
- ruche Warré : ruche étroite et haute avec des éléments de plus petite dimension tous identiques et superposables. Une ruche de base se compose de 2 ou 3 éléments mais ça peut monter jusqu’à 7 pur les grosses colonies et les bonnes années apicoles. Le rayons de cire sont librement construits par les abeilles sans cadres préfabriqués.
Le modèle de ruche que j’ai choisi a conditionné la mécanique de ma balance.
Les jauges de contraintes sont le moyen le plus simple et le plus fiable pour une pesée électronique. On trouve dans le commerce 2 grandes familles de cellules de pesée :
- une cellule unique sous forme de barreau carré avec un pont de jauge complet (connexion à 4 fils) supportant tout le poids et le maintient latéral de la charge.
- des cellules combinées sous forme de pastilles avec 1/2 pont de jauge (connexion à 3 fils) à associer 2 par 2 et ne supportant qu’une poussé verticale sans aucun maintient latéral. Pour une ruche il en faut donc 4 : une à chaque angle.
Du fait que mes ruches sont étroites et hautes, j’ai pensé que ces deux solutions n’offraient pas suffisamment de résistance au vent latéral. J’ai donc retenu une troisième solution : une base mécanique très rigide articulée comme un compas avec seulement 2 cellules positionnées sous la ruche. L’étalonnage permet de compenser la pesée partielle.
La solution que j’ai retenue
Le support de ce premier prototype est en bois de récupération. Il se présente sous la forme d’un compas avec une branche inférieure constituant le socle et recevant les deux cellules de charge et une branche supérieure constituant l’assise de la ruche.
La branche supérieure repose sur la branche inférieure par des têtes de vis qui viennent en appuis sur les points de force des cellules de charge. L’ensemble est articulé à environ 60 cm vers l’avant de la ruche de façon à avoir un report minimum de poids sur l’articulation.
Pour avoir une mesure précise, le centre de gravité de la charge (la ruche) doit être placé sur l’axe matérialisé par les cellules de charge. Afin de diminuer l’erreur de positionnement, un tasseau fixé à 35 cm constitue une butée mécanique vers laquelle le plancher de la ruche doit être placé.



Les files de connexion des cellules de charge, très fins et d’environ 30 cm, sont protégés avec de la gaine thermorétractable. Les cellules de charge sont logées dans des cuvettes et les fils sont insérérs dans des rainures et maintenus par de la colle chaude.
Variante version 75kg
Lors de ma dernière commande, j’ai reçu des cellules de charge 75kg au lieu de cellules 50kg. Second constat ; les cellules sont à sorties 4 fils, c’est à dire qu’elles forment un pont complet (full bridge). Je dois donc modifier légèrement mon support afin d’intégrer une seule cellule sous le centre de gravité de la ruche. Il n’est pas possible de câbler 2 ponts complets sur une seule entrée du module de conditionnement. Une autre solution serait de garder les 2 cellules et de les connecter séparément sur les entrées A et B du module et obtenir ainsi une balance 150kg. Ce n’est pas cette option que je retiens actuellement.
L’avantage de la solution à une seule cellule full bridge est que les 4 fils peuvent se connecter directement sur le module. Il n’est plus nécessaire d’avoir un circuit intermédiaire pour former le pont à partir des 2 demi ponts.
Croquis coté du support
Modification de l’emplacement des cellules
Pour ma troisième version de support, j’ai déplacé les cellules à l’extrémité du support et plus sous le centre de gravité de la ruche. Ce procédé augment légèrement le poids reporté sur l’articulation mais ceci est compensé par l’étalonnage de la balance. Par contre il a l’avantage d’augmenter la distance entre l’articulation et le point de mesure. Cette distance devrait être la plus longue possible pour réduire l’influence d’un mauvais centrage ou d’un mauvais aplomb de la ruche.
2 Module de conditionnement des cellules de charge
Un petit circuit imprimé permet de transformer 2 cellules de charge à sortie 3 fils en un pont à 4 fils. J’ai réalisé celui-ci à partir d’un morceau du circuit prototype à pistes cuivrées et de barrettes de connexion mâle et femelle au pas 2.54 mm.

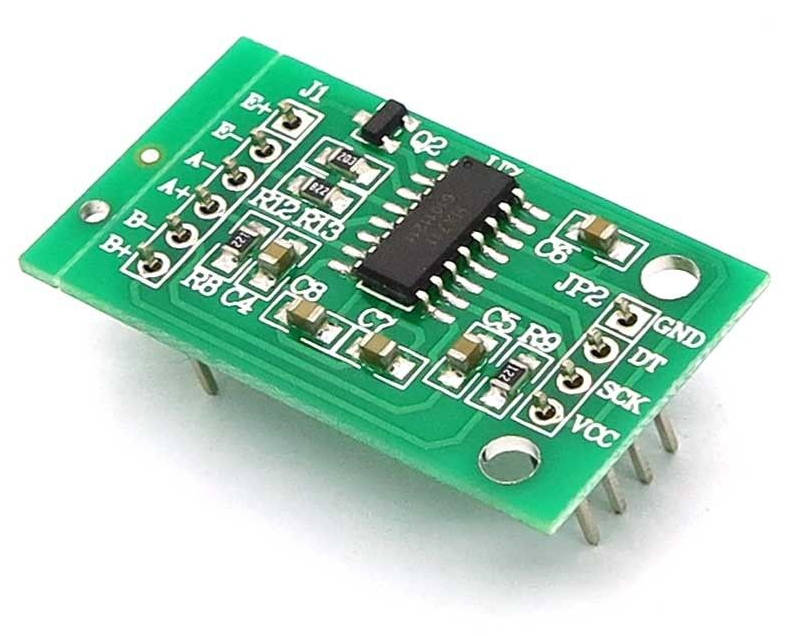
3 Module de traitement des mesures
La connexion du module amplificateur est très simple. Coté cellule de charge : 4 fils correspondant aux 4 sommets du pont de résistance. Si les couleurs des fils sont différentes, pas de problème, il suffit de mesurer les résistances entre fils. On doit avoir environ 1000 ohms entre les sommets du pont et 738 ohms entre fils d’une même branche.
Il est possible d’intervertir excitation et output sans dommage pour la cellule. Si le signal de sortie est inversé, il suffit d’intervertir les fils d’alimentation ou les fils de sortie.

Ci dessous le schéma de connexion du module de traitement entre une cellule à sortie 4 fils (full bridge) un un Arduino Uno. Pour un Arduino Pro Mini, le branchement est identique.

Coté cellule de charge : alimentation E+ et E- et sortie mesure A+ et A-
Coté Arduino : alimentation Vcc et Gnd et signaux horloge (SCK) et données (DT).
 - noir")